The velocity of transverse traveling waves on a stretched spring Jacobs, with the class of 2008
Introduction
When a traveling wave reaches a fixed (closed) boundary it reflects to overlap in incoming wave. (figure 1).
Fig 1 Wave reflection from a closed boundary.
If a spring is stretched between two people, both ends form closed boundaries. If one person drives a small transverse oscillation, wave energy is repeatedly reflected from each end. At some particular frequency, wave energy builds up on the spring, and a standing wave is established (figure 2).

Fig 2 A composite photograph showing a standing on the stretched spring in to extreme positions.
The standing wave is formed by the superposition of two transverse waves, of the same amplitude, moving in opposite directions, at the same velocity. The wave equation, v=fl, applies to these traveling waves. If the frequency and wavelength of the standing wave are measured, the velocity of the traveling waves can be found.
Procedure
A 1.5 meter steel spring was suspended above the floor by stretching it to a length of 8.8 meters between two people. Standing waves of one, two, three, and four loops, were established on the spring by driving small transverse oscillations by hand. The time for ten oscillations was measured independently with stop watches by nine people. The measurements are recorded in Table 1.
Data
Table 1
 Measured times for ten oscillations of the spring carrying standing waves of 1, 2, 3 and 4 loops. The amplitude of each standing wave was ~30 cm. |
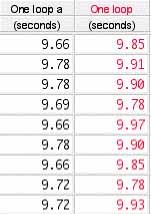
Following a suggestion by Mansi Jain, (that the manner in which the oscillations are driven may affect the frequency), the times for ten oscillations were measured for low frequency standing waves of different amplitudes, (see Table 2).
Table 2
The times in the left hand column for a standing wave of 0.30 m amplitude can be compared to the times on the right for a wave of 1.0 m amplitude. The periods and hence the frequencies appear to differ by a small amount (see Graph 1).
Errors
The measured times for ten oscillations listed in Tables 1 and 2 are plotted in Graph 1.
 |
Graph 1 The panels show that the median and mode for each data set are almost identical, (as expected for normally distributed random errors). The mean values and the standard deviations for waves of 30 cm amplitude are listed in Table 3. The increased errors at higher frequencies are due to the difficulty of timing the oscillations with hand held stop watches.
The times for ten oscillations with errors
One loop Two loops
Three loops Four loops

9.87 ± 0.06 s 4.85 ± 0.14 s 3.3 ± 0.1 s 2.6 ± 0.2 s Table 3 Each standing wave was of approximately the same amplitude (~30 cm), including the wave of just one loop.
Analysis
The frequency of the wave generator is calculated as the reciprocal of the period, (f = 1/T). The stretched spring between the fixed boundaries was 8.8 meters long. The wavelengths and frequencies are listed in Table 4 with the calculated traveling wave velocities.
Table 4
The traveling wave velocity is plotted against the frequency in Graph 2.
 Graph 2 Two points are shown for each standing wave. The difference in the point positions represents the errors in the data. A line has been fitted to the points by hand, showing that within ±1 m/s the wave velocity is a constant 18 m/s. The computer calculation of mean and standard deviation confirms this value, within errors. |
Direct measurement of wave (pulse ) velocity
The spring was stretched to 8.8 meters. A sharp pulse was made by a single sideways movement (across and return) at one end. The time for the pulse to reflect back and forth ten times was measured with stop watches. The time data, the mean, and the standard deviation are shown in Graph 3.